熱線:021-66110810,66110819
手機:13564362870
熱線:021-66110810,66110819
手機:13564362870
Variability and Uncertainty Analysis of N2O Emissions from WWTP to Improve the Accuracy of Emission Factors and the Design of Monitoring Strategies
污水處理廠 N2O 排放的可變性和不確定性分析提高排放因子的準確性和監測策略設計
來源:ACS EST Water 2024, 4, 2542?2552
1. 摘要核心內容
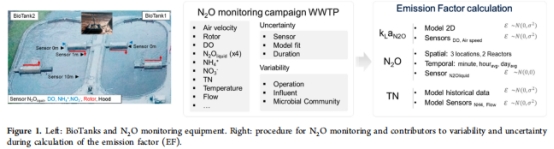
問題背景:全球污水處理廠(WWTP)N?O排放研究常忽略數據變異性(技術、運行、進水特性、微生物群落差異)和不確定性(監測點位、方法、頻率、時長),導致排放因子(EF = N?O排放量/總氮負荷)準確性不足。
關鍵發現:
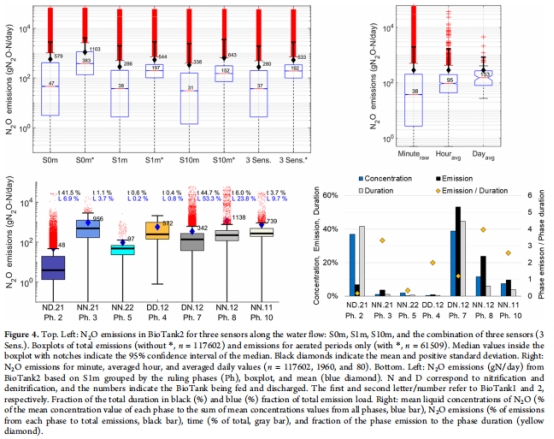
N?O排放呈正偏態分布(對數分布更適用),11.6%的天數貢獻50%排放(圖4)。
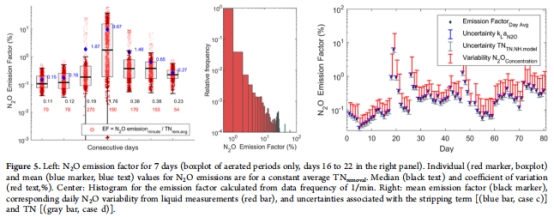
EF均值為 0.30±1.29%(n=117,602),標準差大表明正態分布不適用,推薦使用中位數和分位數(如2.5–97.5%)描述(圖5)。
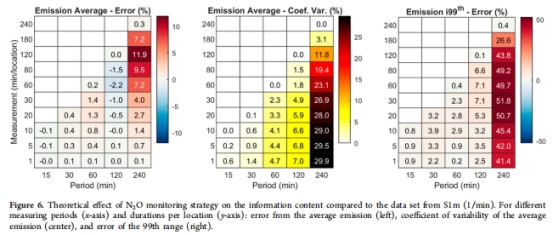
優化監測策略:每30分鐘監測5分鐘(替代連續監測)可在保證精度下實現6個點位輪巡(圖6)。
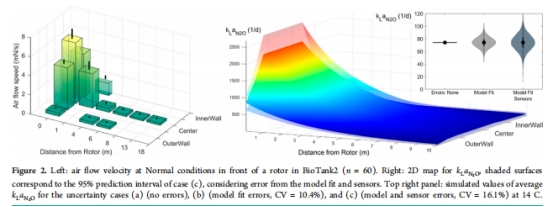
剝離模型(kLa???)最小誤差10.4%(僅模型)或16.1%(含傳感器誤差)(圖2)。
2. 研究目的
闡明表面曝氣WWTP中驅動N?O排放的運行變量(如相控策略)。
量化基于液相測量的N?O排放不確定性(剝離模型誤差)。
分析N?O排放的時空變異性(110天高頻監測)。
評估數據采集頻率對EF準確性的影響,優化監測策略。
3. 研究思路
graph LR
A[丹麥Gummerup WWTP] --> B[相控表面曝氣工藝]
B --> C[高頻監測110天]
C --> D[Unisense液體N?O傳感器×4]
D --> E[空間點位: S0m/S1m/S10m]
E --> F[建立kLa???剝離模型]
F --> G[量化時空變異性和不確定性]
G --> H[模擬多點位間歇監測策略]
4. 測量數據及研究意義
核心數據來源與意義
測量內容 數據來源 研究意義
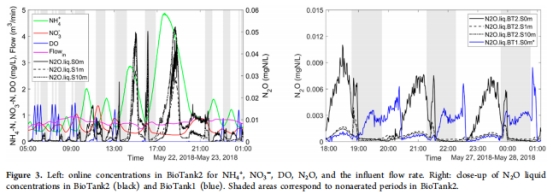
N?O液體濃度 Unisense傳感器(1分鐘頻率) 揭示相控運行下的動態規律:曝氣初期緩升,NH??耗盡后降,停曝后因持續產生驟升(圖3右)
空間異質性 S0m(低湍流)、S1m(高湍流)、S10m(下游) 證實傳感器位置顯著影響排放估算(S1m代表性最佳,S0m高估101%)(圖4)
剝離系數kLa??? DO測量+空氣流速模型(圖2) 量化模型誤差(10.4–16.1%),為排放計算提供不確定性范圍
相控運行數據 在線NH??/NO??/DO/流量(圖3左) 關聯高排放與延長硝化相(相3/8),指導優化曝氣策略(圖4右下)
N?O消耗潛力 離線批次實驗(正文3.3) 揭示好氧條件下N?O還原未被完全抑制(1.9–15 gN/(kgSS·d))
5. 關鍵結論
排放分布特征:
N?O排放呈對數正態分布(非正態),4.7%的小時和11.6%的天數貢獻50%排放(圖4)。
EF報告建議:避免均值±標準差(0.30±1.29%),改用中位數(0.101%)和分位數范圍(0.024–2.464%)(圖5)。
空間變異性:
93.9%排放來自高湍流區(S1m),傳感器位置偏差可致估算誤差18–101%(圖4)。
多點監測中,S1m單點數據與三傳感器組合差異僅2.1%(支持簡化布點)。
監測策略優化:
每30分鐘監測5分鐘的策略誤差僅0.3%,可支持6點位輪巡(圖6)。
低頻監測(如30分鐘/240分鐘)嚴重低估峰值(99%分位誤差42%)。
不確定性量化:
kLa???最小誤差10.4%(模型)→ EF總不確定性16.7–42%(依賴TN???d估算方法)(圖5)。
6. Unisense電極數據的詳細解讀
研究意義與價值
高頻動態捕獲:
1分鐘分辨率揭示相控工藝的瞬態特征(圖3右):停曝后N?O因持續產生且剝離減少而驟升,為機制解析提供關鍵證據。
空間代表性驗證:
三位置同步監測(S0m/S1m/S10m)量化點位偏差(圖4),證明高湍流區(S1m)最具代表性,而控制點(S0m)高估101%,指導優化傳感器布設。
分布特性解析:
基于117,602數據點證明N?O呈對數正態分布(圖4、5),推翻傳統EF的正態假設,推動采用中位數和百分位數報告。
技術可靠性:
跨生物池相關性(S0m與S0m*的R2=0.73)和故障期數據修正(負值/漂移校準),驗證Unisense電極在長期監測中的穩定性。
對領域貢獻
方法論革新:確立液相監測在高變異系統中的應用價值,為EF標準化提供數據基礎。
實踐指導:優化監測策略(時間/空間權衡),降低全廠N?O監測成本。
總結
該研究通過丹麥Unisense電極的高頻空間監測,揭示了WWTP中N?O排放的強時空異質性和對數分布特性,量化了剝離模型的不確定性,并提出了以中位數+分位數報告EF、多點間歇監測為核心的優化方案,為全球污水處理廠N?O監測標準化提供關鍵依據。